NOTE: I am on the job market! Please consider reaching out if you think I might be a good fit.
I am a final-year PhD candidate at Mila and Concordia University advised by Eugene Belilovsky. My research is supported by FRQNT and Frederick Lowy Scholars fellowships.
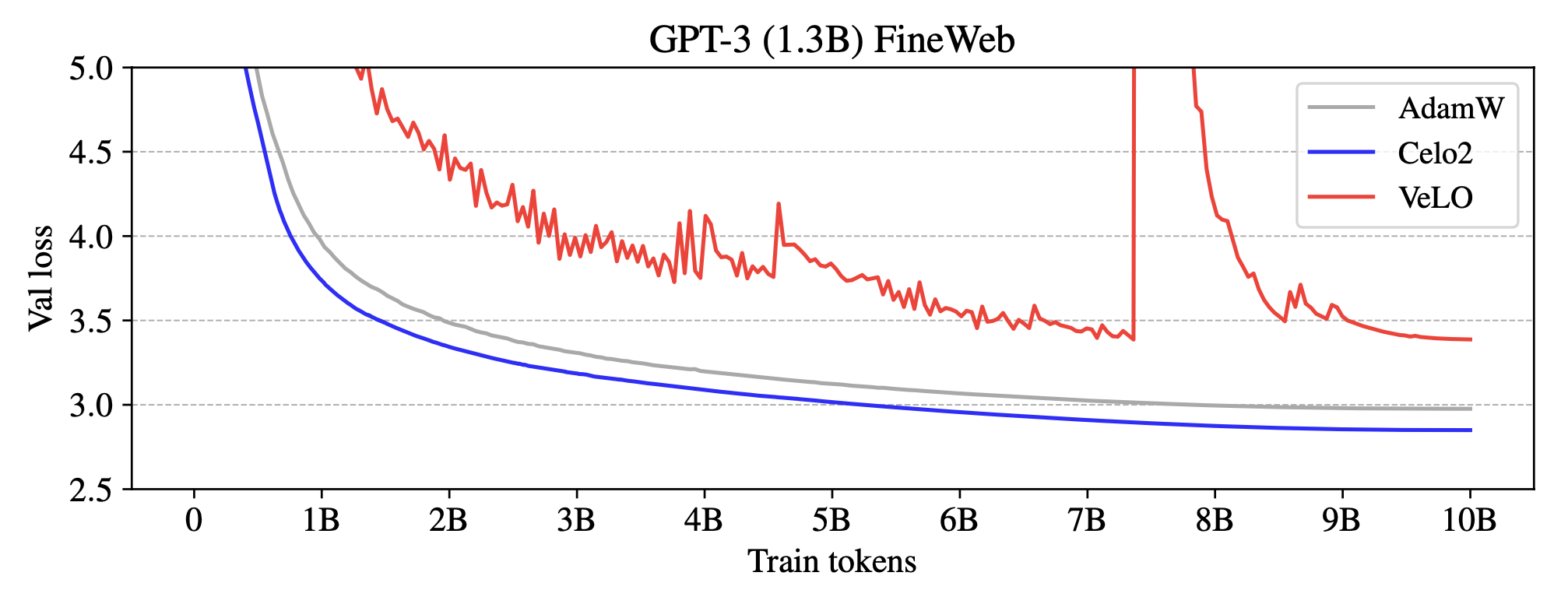
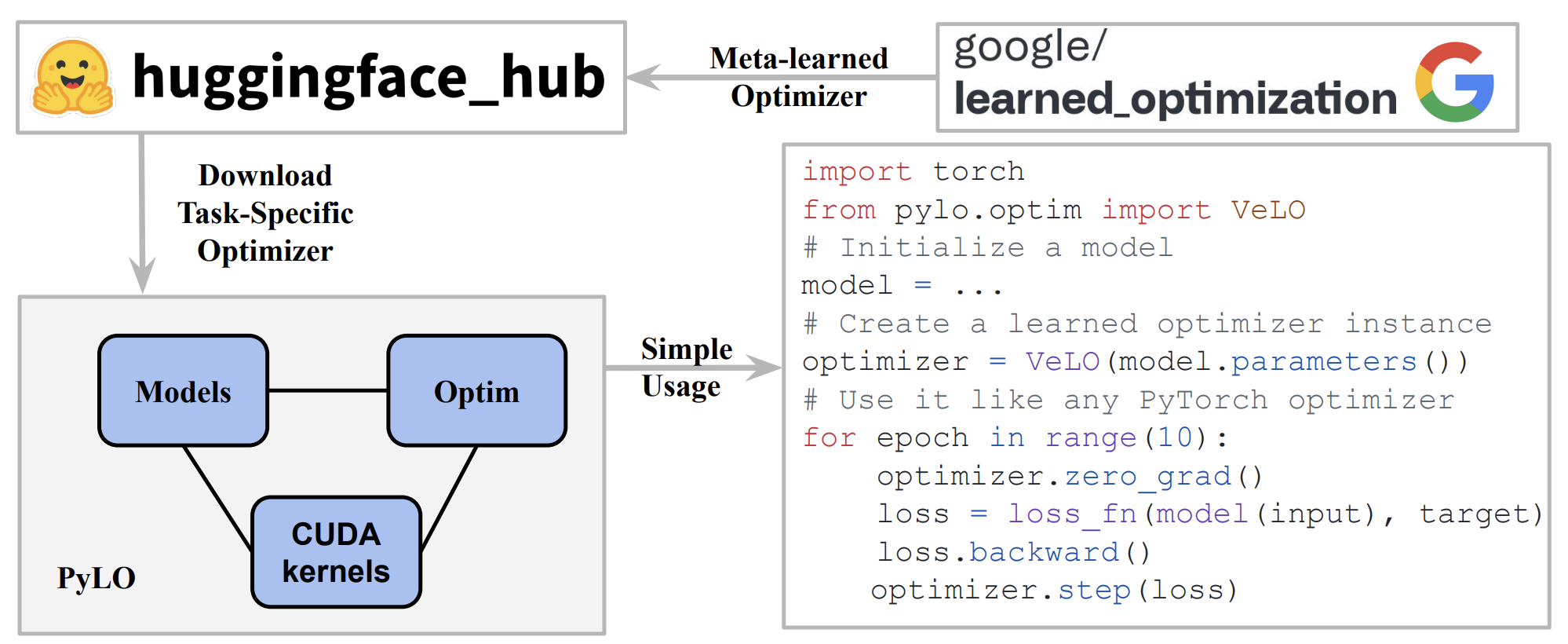
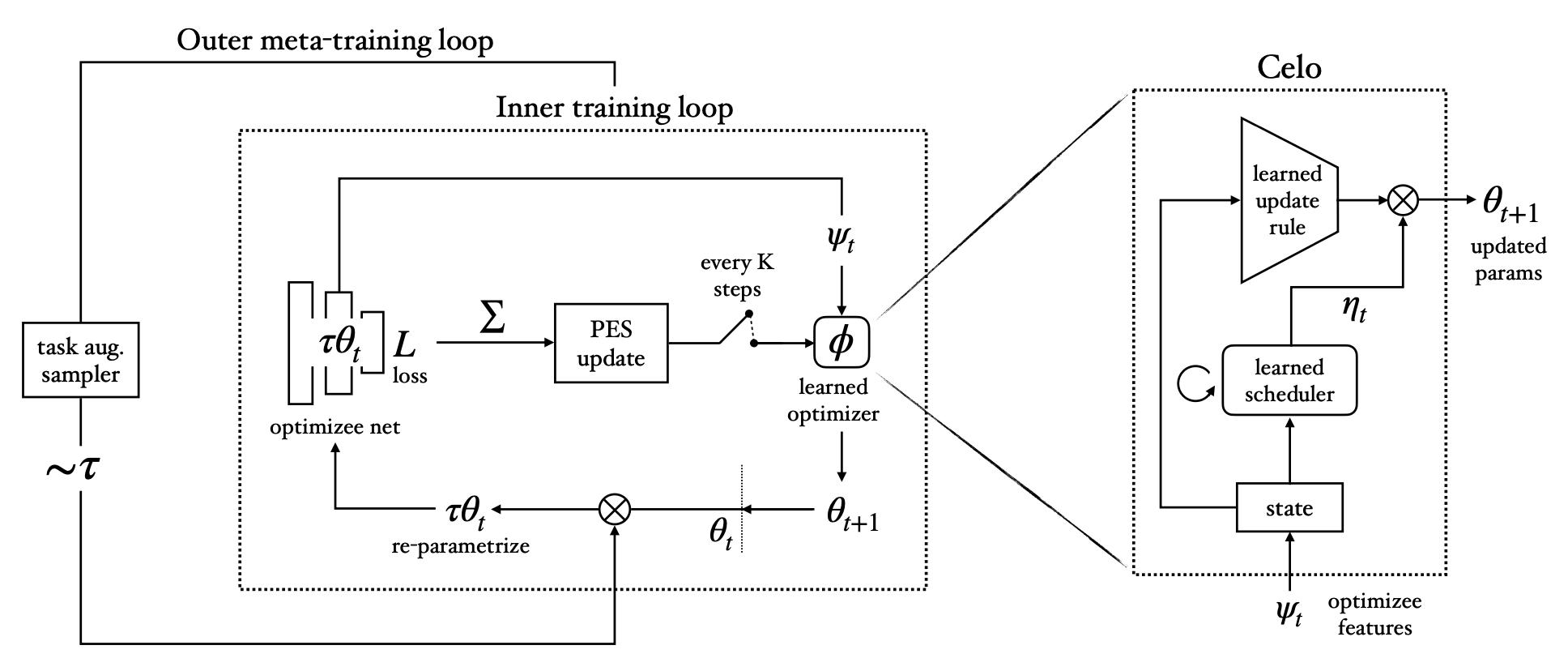
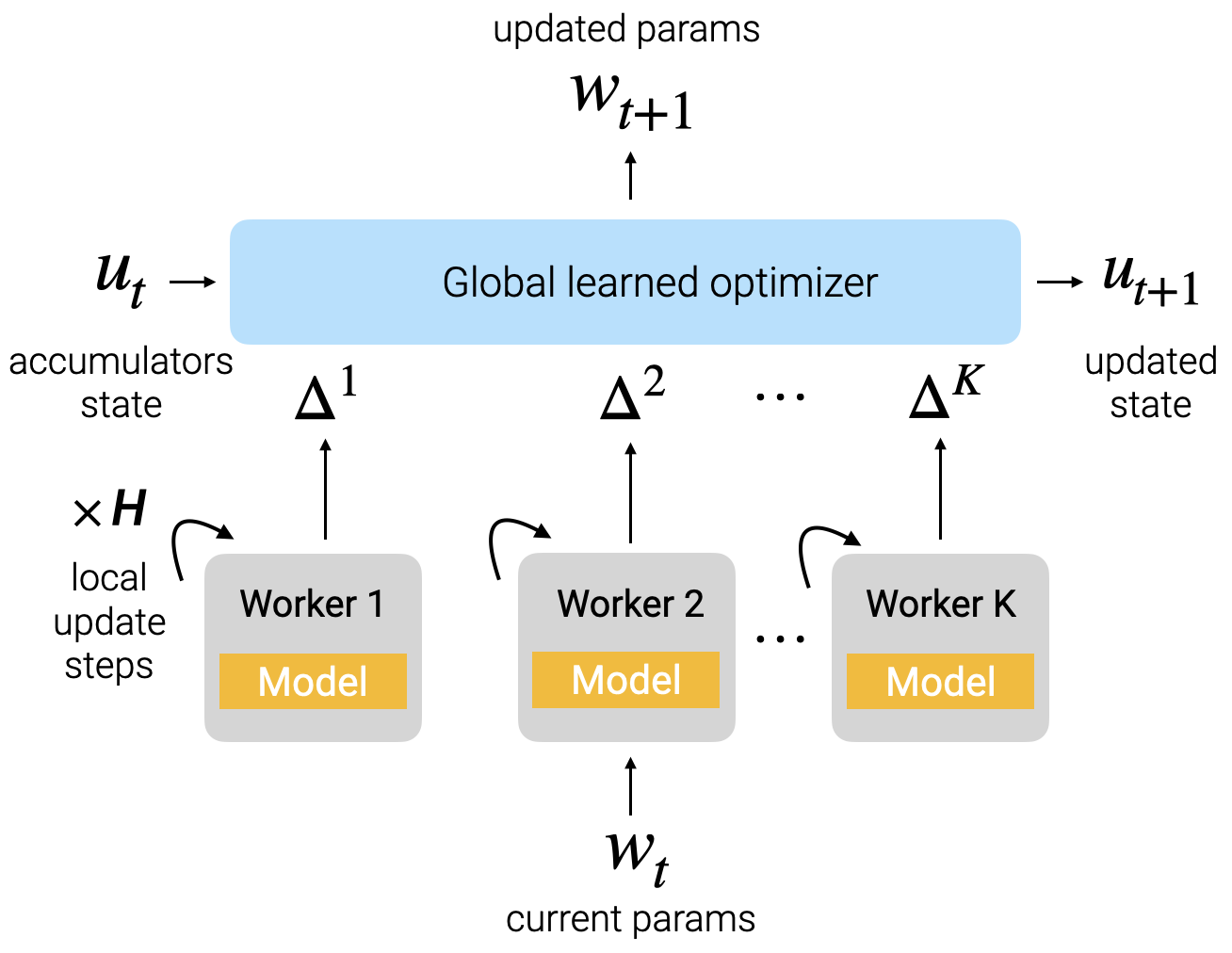
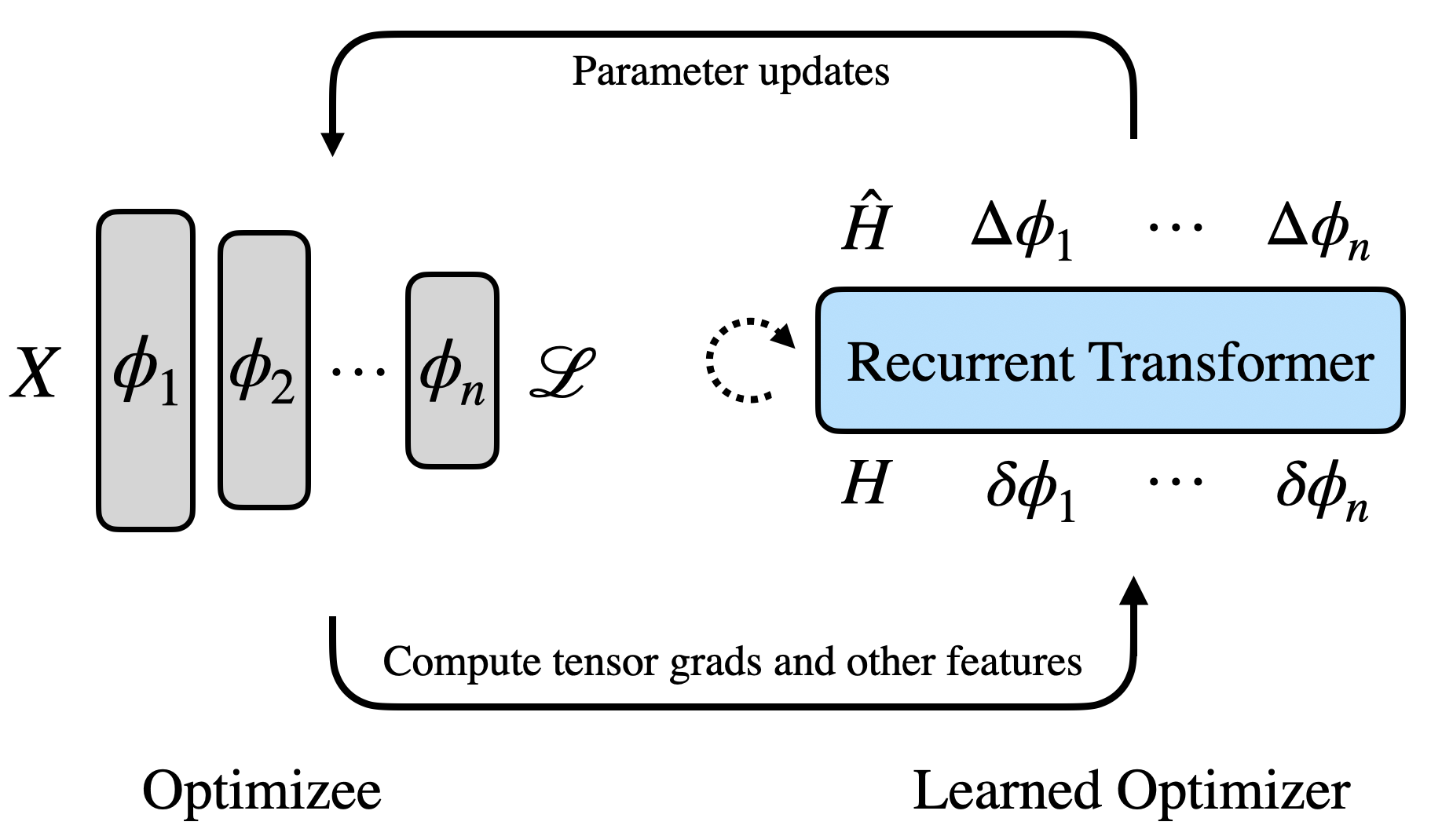
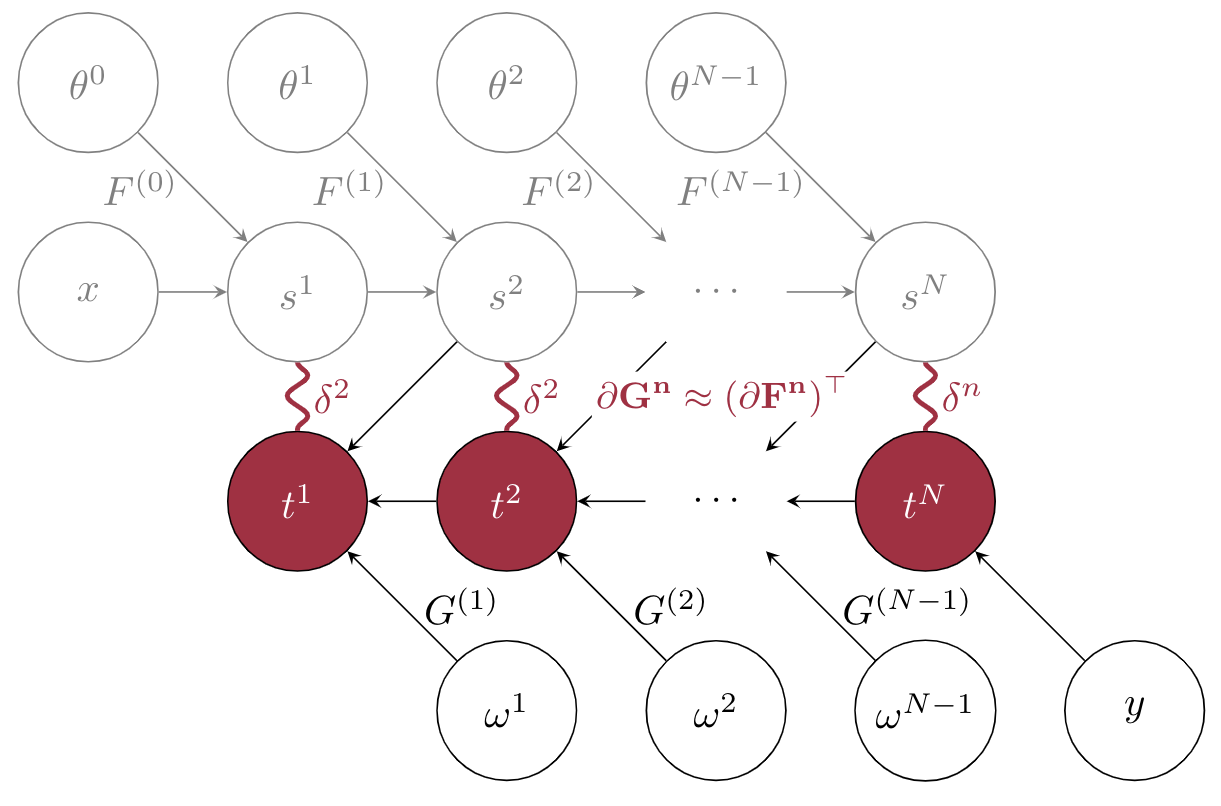
My PhD research focuses on learnable optimization algorithms that can improve by leveraging data and compute. My recent work, Celo2, shows that learned update rules can scale to practical billion-scale tasks like GPT-3 pretraining which are six orders of magnitude larger than the meta-training distribution. This unlocks a scalable path towards improving optimization algorithms and I'm excited to push them beyond academic research to evolve the training pipelines of modern AI systems!
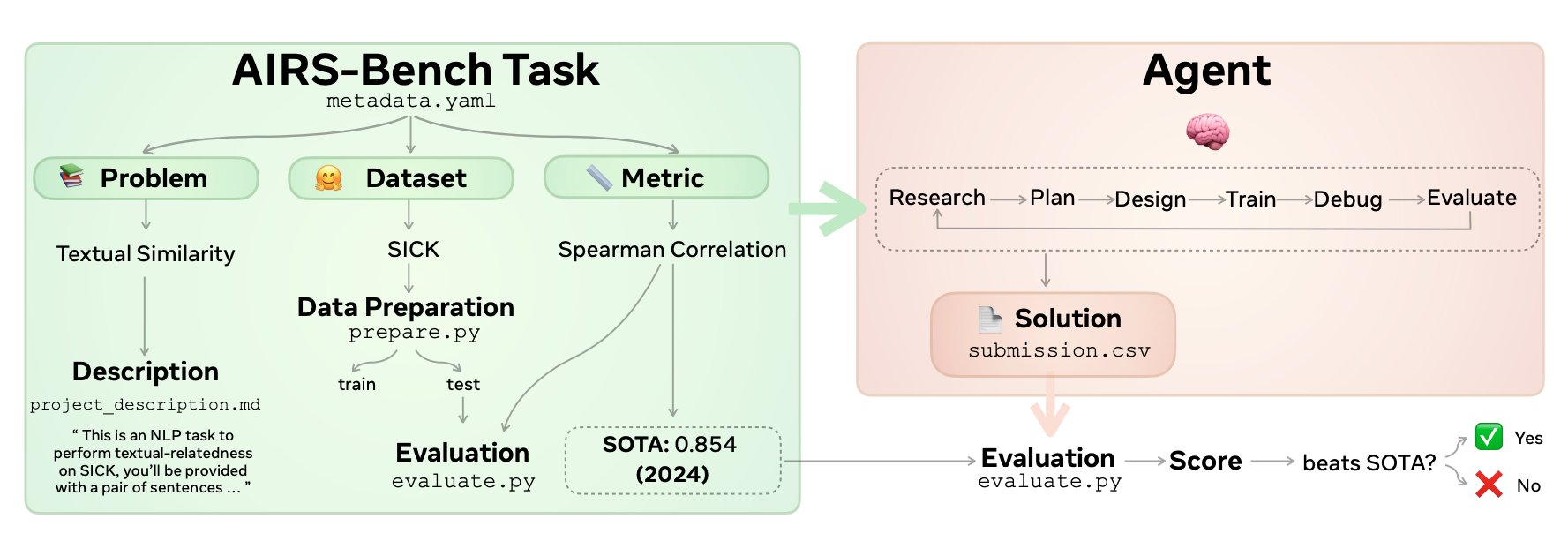
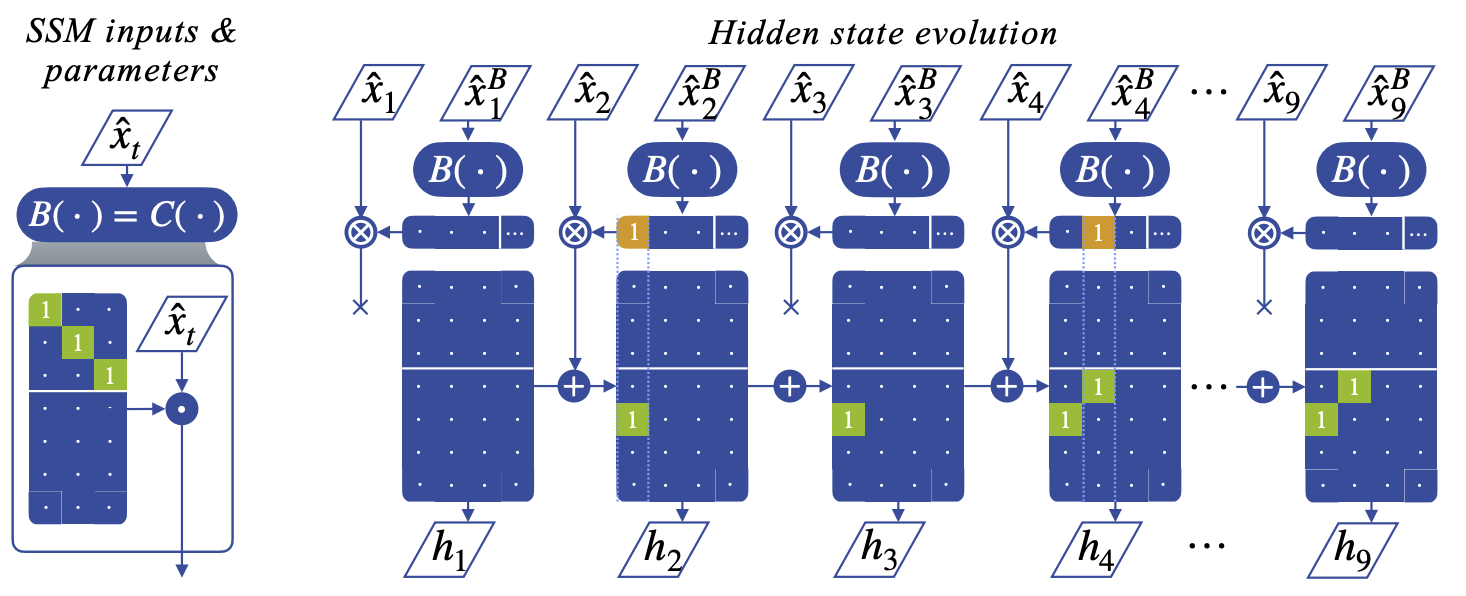
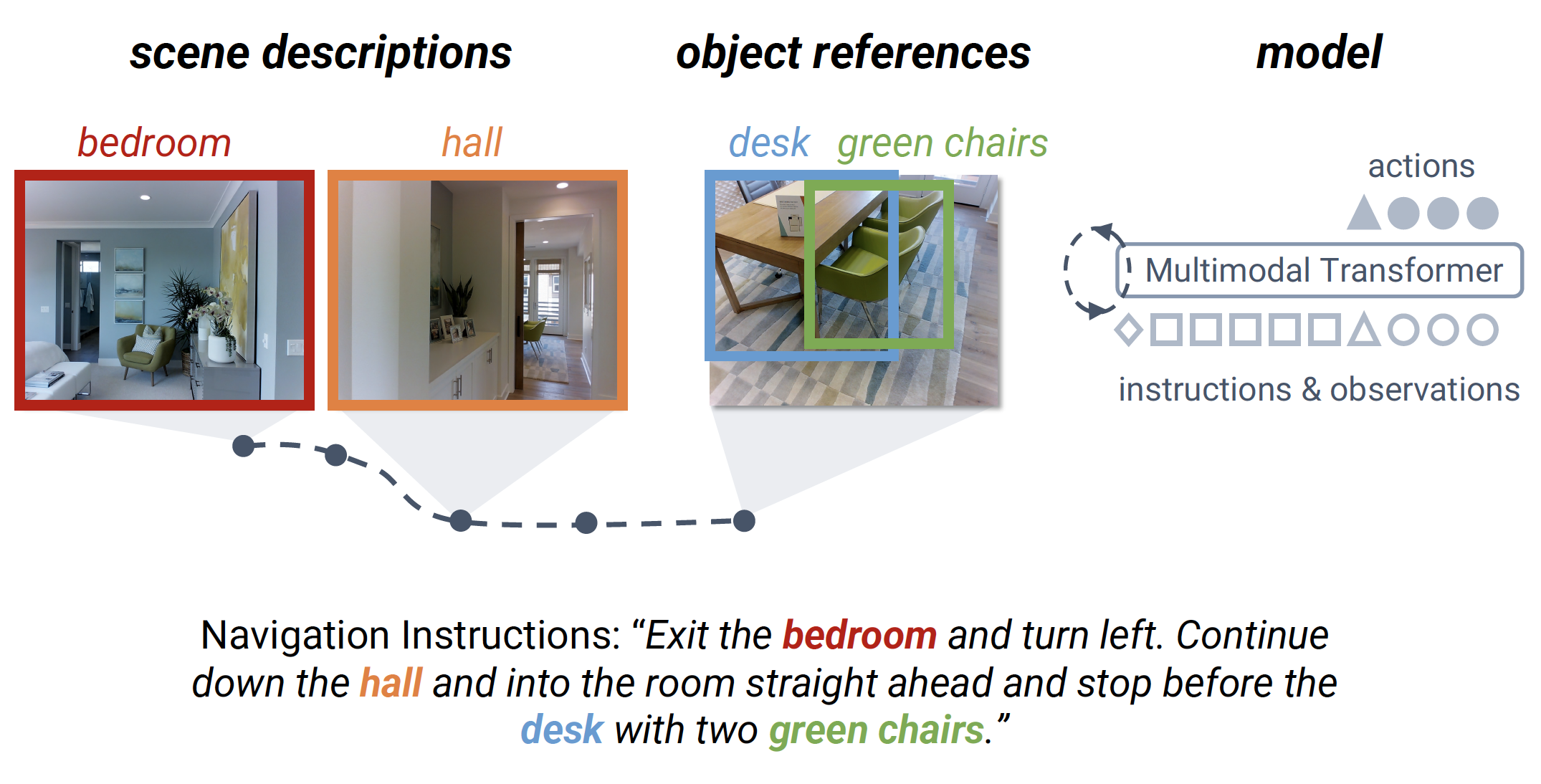
I have been fortunate to work with wonderful folks in diverse areas of machine learning. Most recently, I worked at Meta Superintelligence Labs (FAIR) with Yoram Bachrach and Jakob Foerster on AI research agents. At Apple MLR, I worked with Federico Danieli on state-space models (Mamba) as an intern. Before starting my PhD, I spent 1.5 years as a Visiting Scholar with Devi Parikh and Dhruv Batra at Georgia Tech, where I worked on multi-modal embodied agents.